


")

")
VISION SYSTEME
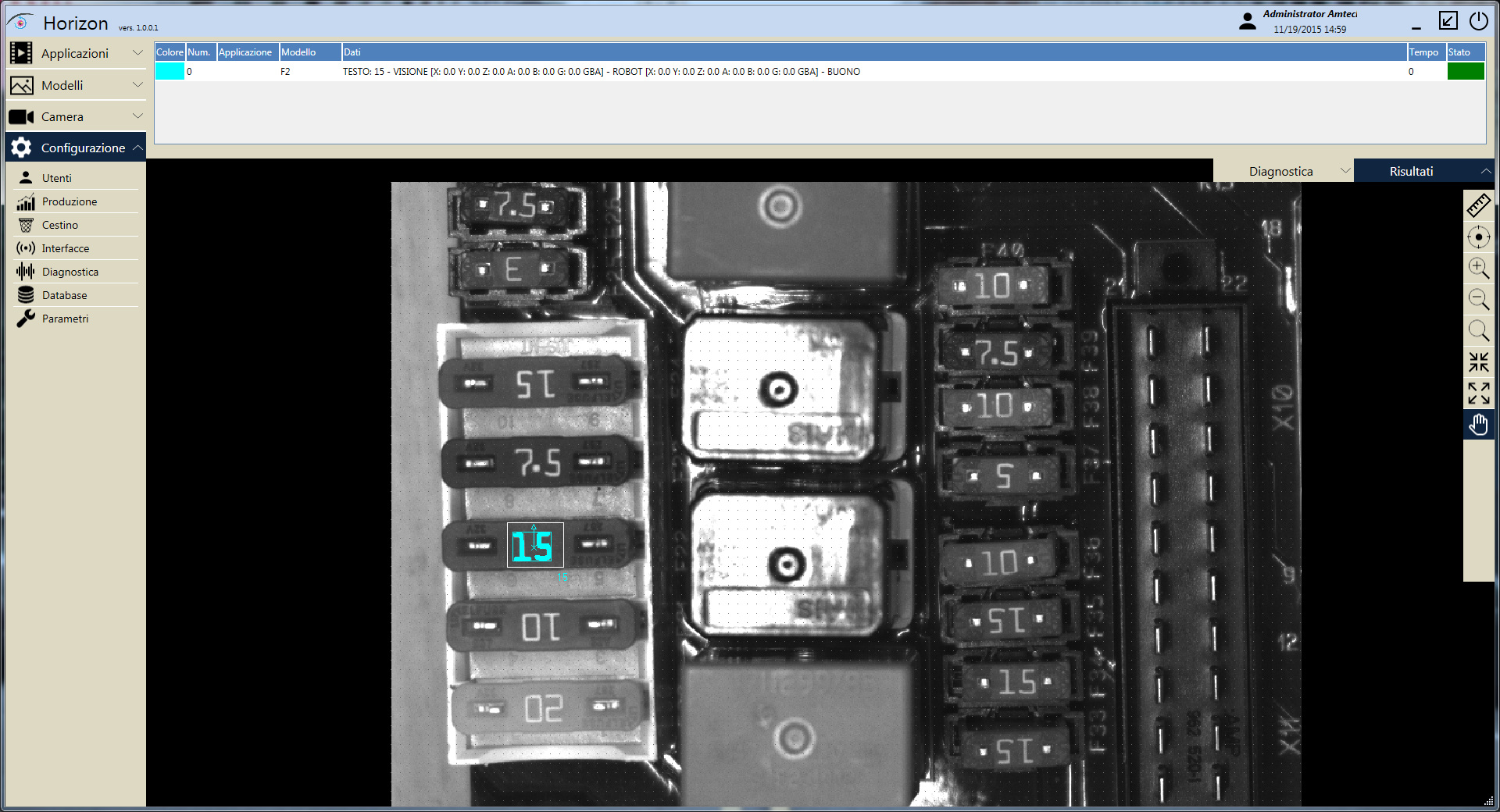
Das System ist in der Lage, in den folgenden Fällen Zeichenfolgen zu erkennen und korrekt zu dekodieren:
- Bedruckte Etiketten
- Siebdruck auf einem Werkstück
- Lasermarkierung
- Microdot-Markierung
- Kennzeichnung von Fässern
- Geprägte Zeichen
Zur korrekten Identifizierung der Beschriftung ist es möglich:
- die Position des Schriftzuges zu identifizieren
- seine Ausrichtung in Bezug auf die horizontale Achse
- die Größe der einzelnen Zeichen
- den Inhalt der Zeichenkette
Das Ergebnis der Dekodierung ist die vom System erkannte Zeichenfolge in ASCII-Kodierung.
Beispiele:

Das System ist in der Lage, die folgenden Arten von 1D/2D-Codes zu erkennen und zu dekodieren:
- Barcode
- Datamatrix ECC 200
- QR-Code
- Mikro-QR-Code
- Azteken-Code
- PDF 417
Innerhalb desselben Rahmens kann es mehrere Codes geben, die das System sowohl nach Art als auch nach Position unterscheidet und korrekt dekodiert.
Beispiel 1: Barcode-Dekodierung
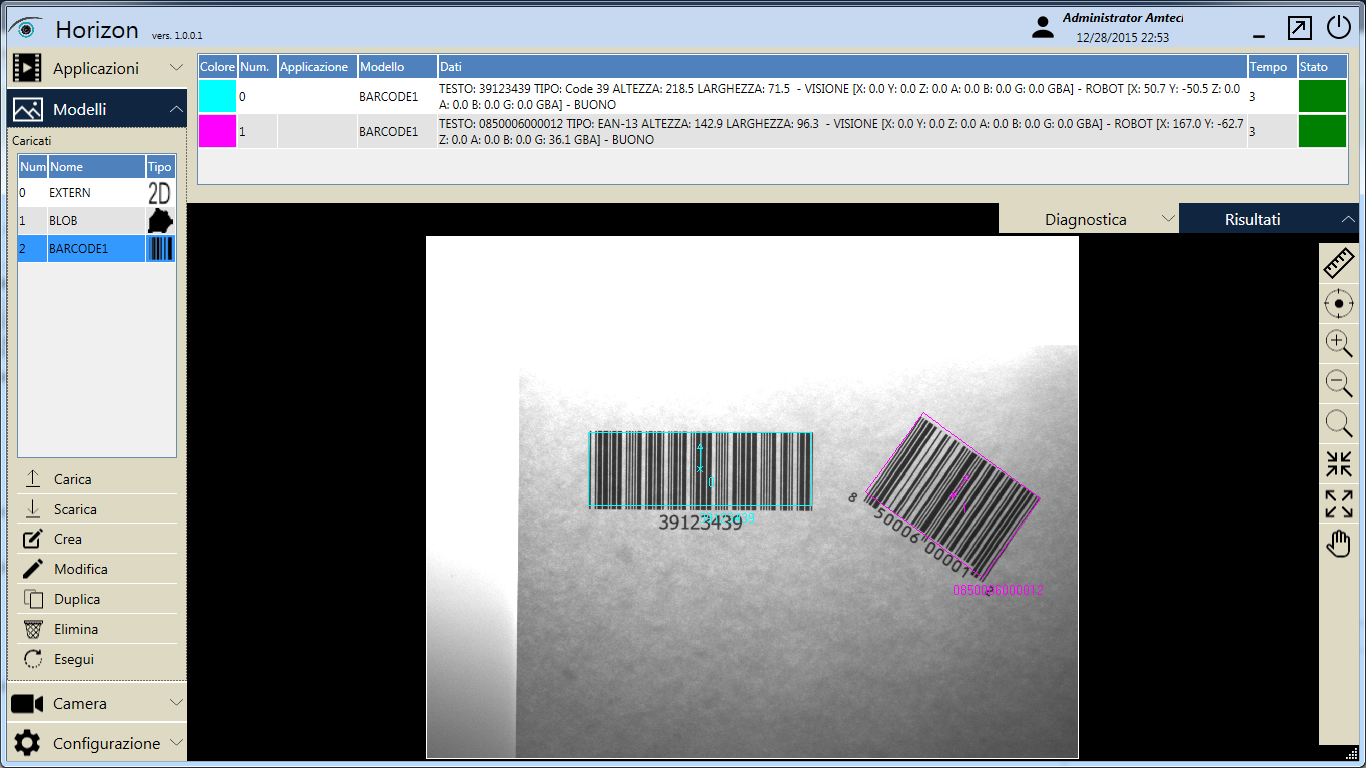
In diesem Beispiel erkennt das System das Vorhandensein von zwei Objekten mit unterschiedlicher Kodierung, Position, Drehwinkel und Dekodierung.
Beispiel 2: Datamatrix-Dekodierung
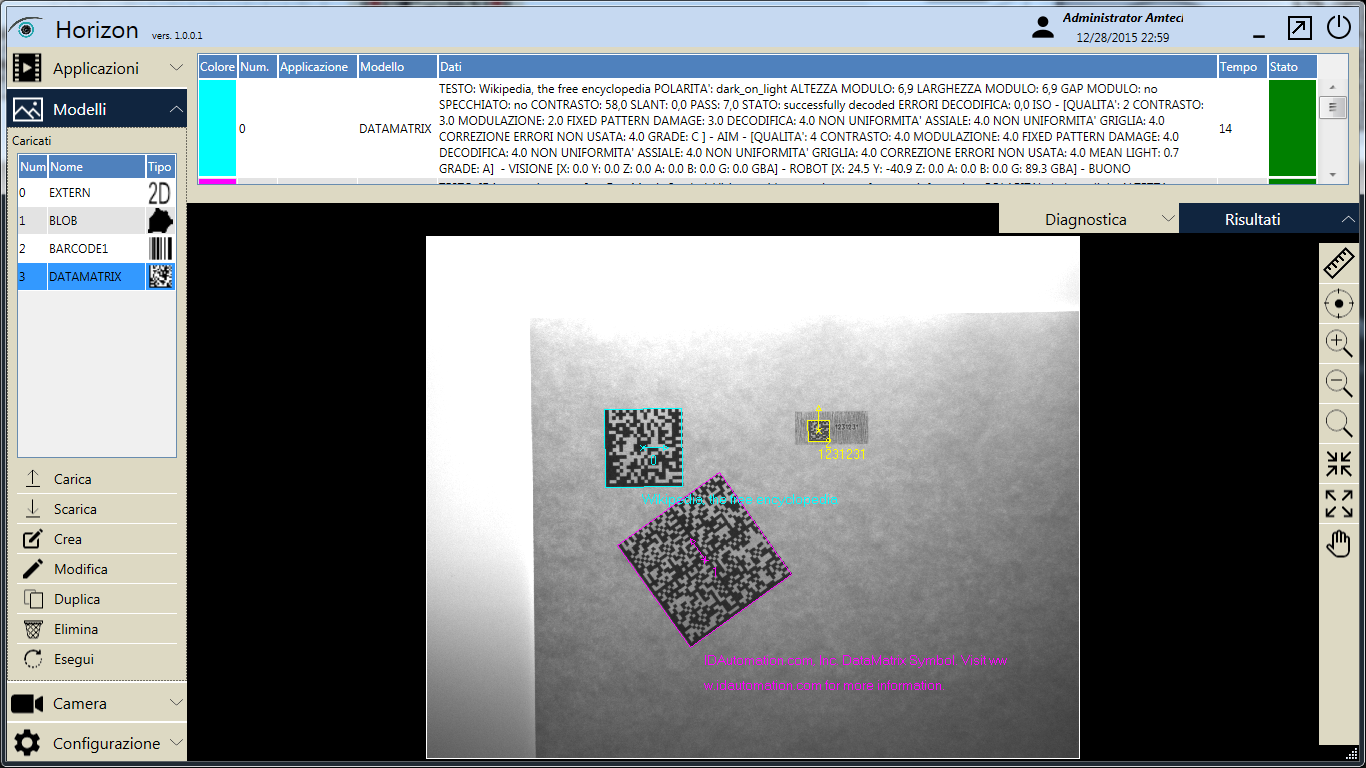
Das System nutzt die inhärente Fehlertoleranz von 2D-Codes in vollem Umfang aus, um eine korrekte Dekodierung selbst in den extremsten Fällen zu gewährleisten, wie z. B. beim Lesen von gestanzten Datamatrix, die sandgestrahlt wurden.
Das System ist in der Lage, eine Klassifizierung der Lektüre nach verschiedenen Normen vorzunehmen:
- Datamatrix ECC 200
- QR-Code
- Mikro-QR-Code
- Azteken-Code
- PDF 417
Das System umfasst eine Bildvorverarbeitungsphase, um Rauschen zu reduzieren und die Bildqualität zu verbessern.
Beispiel 1: Profilrekonstruktion
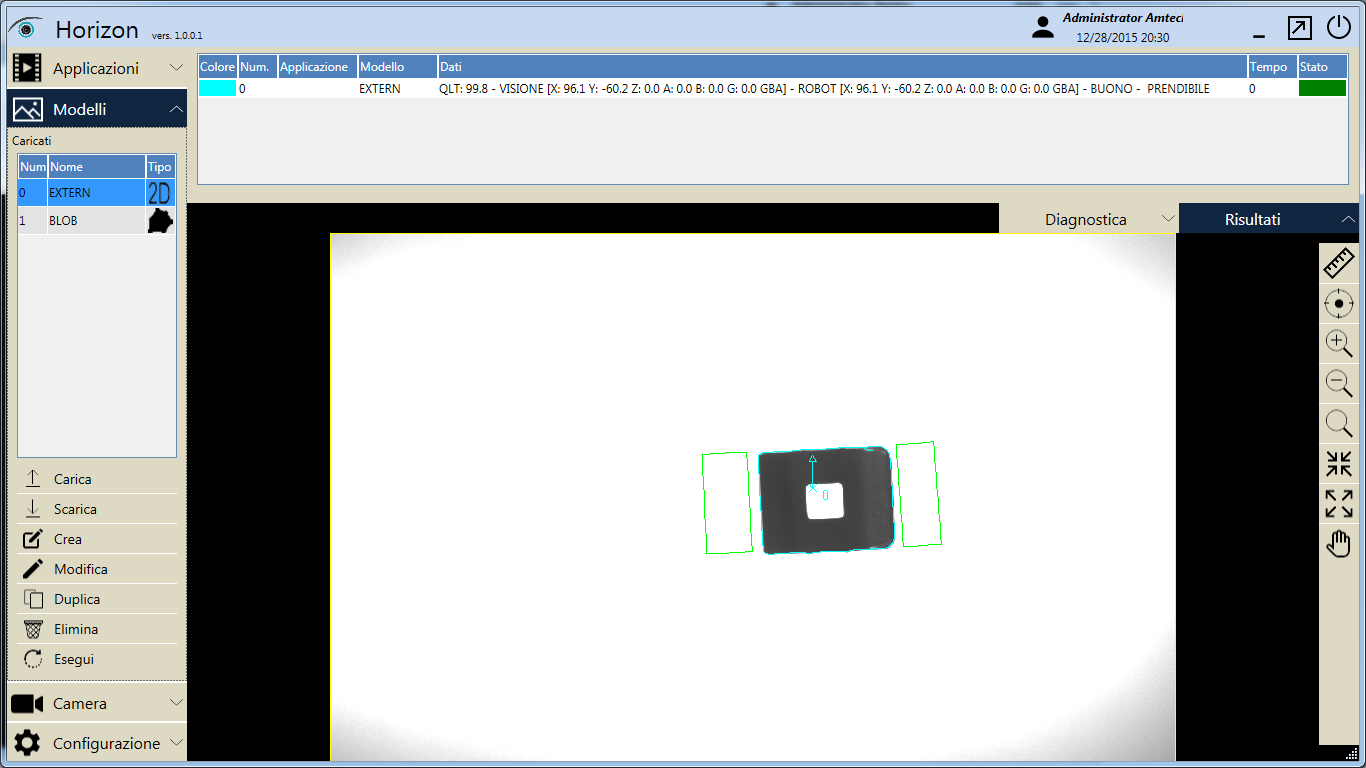
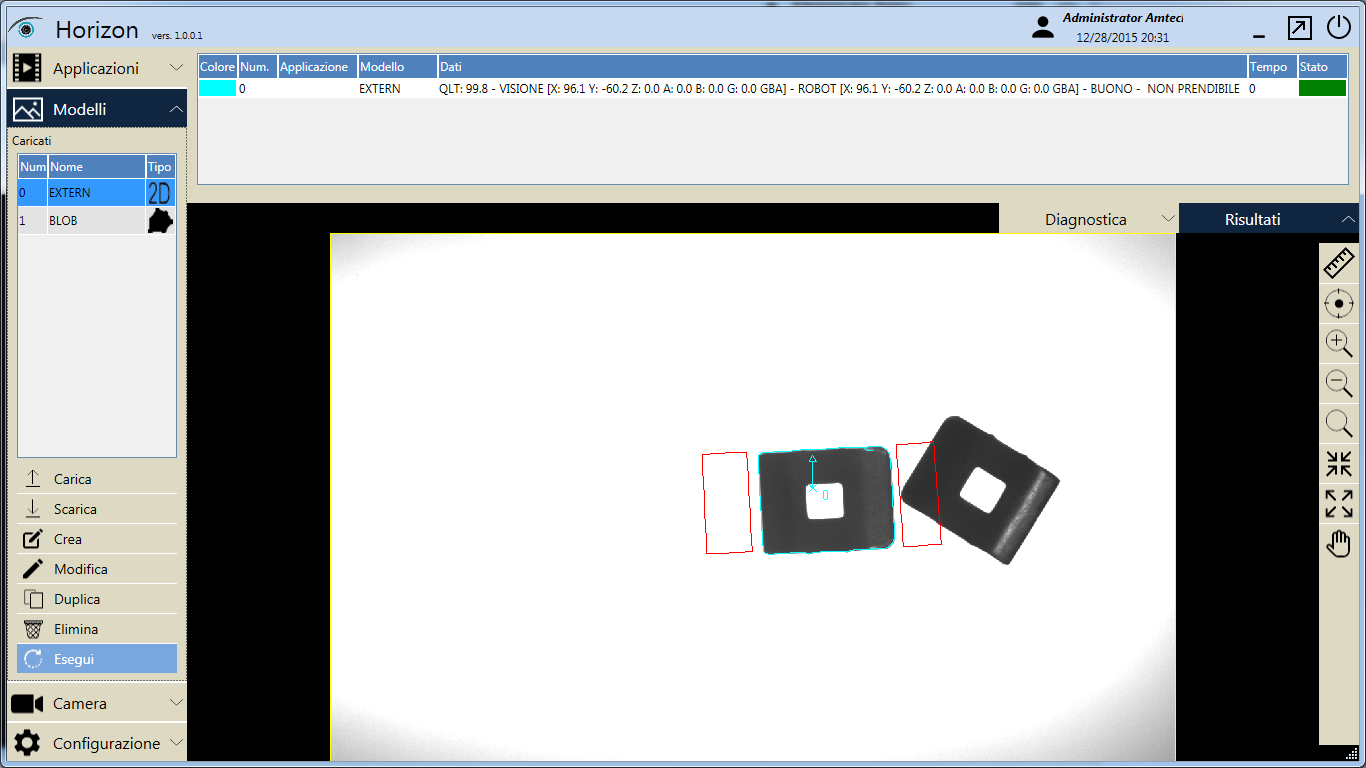
Dem Modell werden Bereiche zugeordnet, um die Möglichkeit des Greifens des Teils auf der Grundlage ihrer Belegung durch andere Teile zu bewerten.
In der Abbildung unten ist einer der beiden Bereiche mit einem Werkstück belegt, und das System identifiziert das Werkstück als nicht einspannbar.
HORIZON
Das robotergeführte Horizon-Bildverarbeitungssystem kann mit den folgenden Kameratypen arbeiten:
KEYENCE
Wir verwenden das Keyence-Vision-System auch für die Roboterführung und die Qualitätskontrolle.
![]()
Bei beiden Systemen wird die Bildverarbeitung eingesetzt, um den Einfluss des Umgebungslichts zu reduzieren.
Der gleichzeitige Einsatz mehrerer Kameras ist möglich; die Erfassungsgeschwindigkeit hängt von der Art und Auflösung der Kamera ab.
rechtlicher und operativer Standort:
Via dei Mulini, 156
25039 TRAVAGLIATO (BS)
Italy
Umsatzsteuer-Identifikationsnummer und Steuernummer: 03743080982
SDI: T04ZHR3
KONTAKT:
PARTNERIN:
