


")

")
Grazie all'utilizzo degli ultimi sensori di visione 3D il sistema è in grado di processare i seguenti modelli:
- profili tridimensionali
- superfice tridimensionale
- solidi
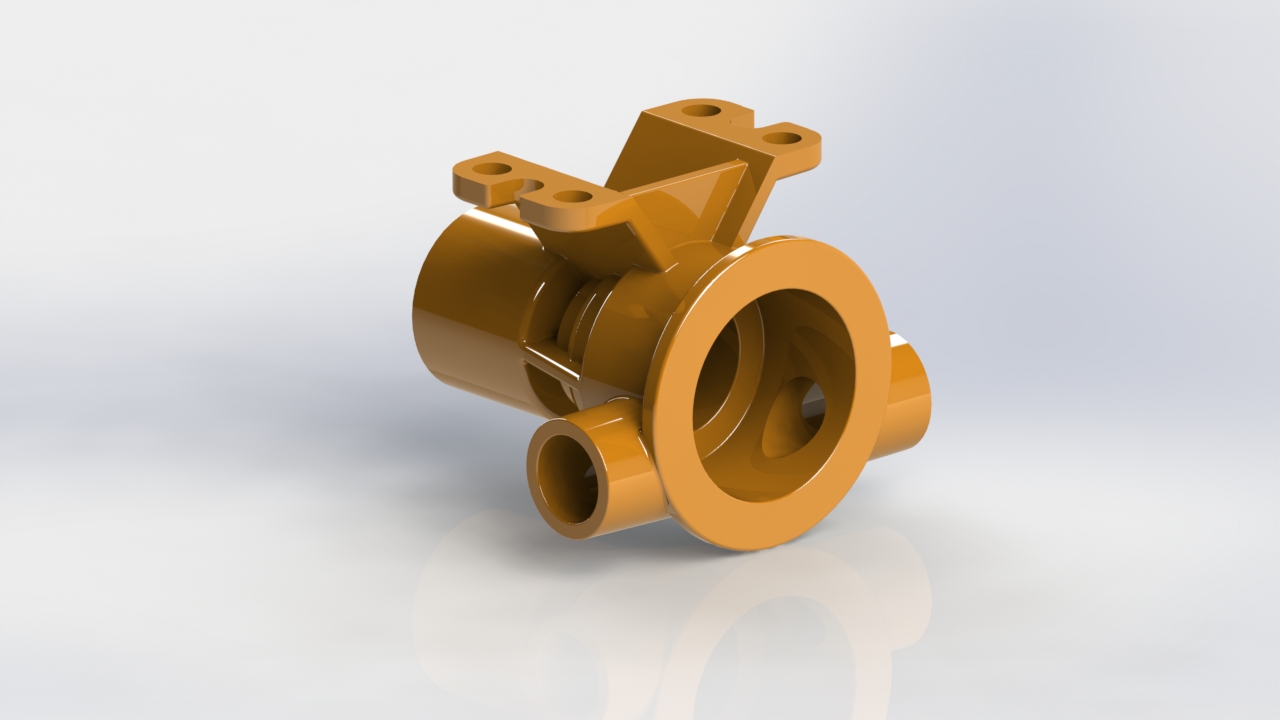
La creazione del modello per la presa tridimensionale del pezzo è possibile mediante l'utilizzo del file 3D STL dell'oggetto che si vuol identificare.
Esempio 1: Solido dell'oggetto da identificare
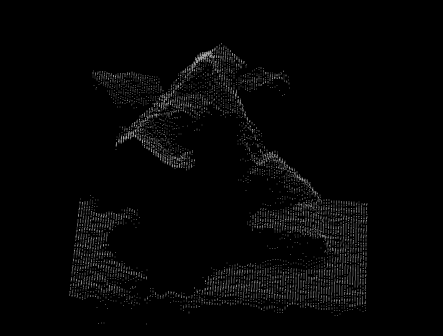
Oppure mediante la nuvola di punti ottenuta scansionando un oggetto campione.
Esempio 2: Nuvola di punti acquisita
Mediante questo sistema l'operatore non deve necessariamente avere il file del solido ma può ricostruirlo.
Una volta costruito il modello il sistema lo ricerca all'interno dello spazio tridimensionale valutando mediante i criteri impostati la possibilità di presa del pezzo stesso.
Ad ogni modello è associata la guida robot per effettuare la presa del pezzo nello spazio tridimensionale, considerando la posizione in altezza e le rotazioni attorno a tutti e tre gli assi.
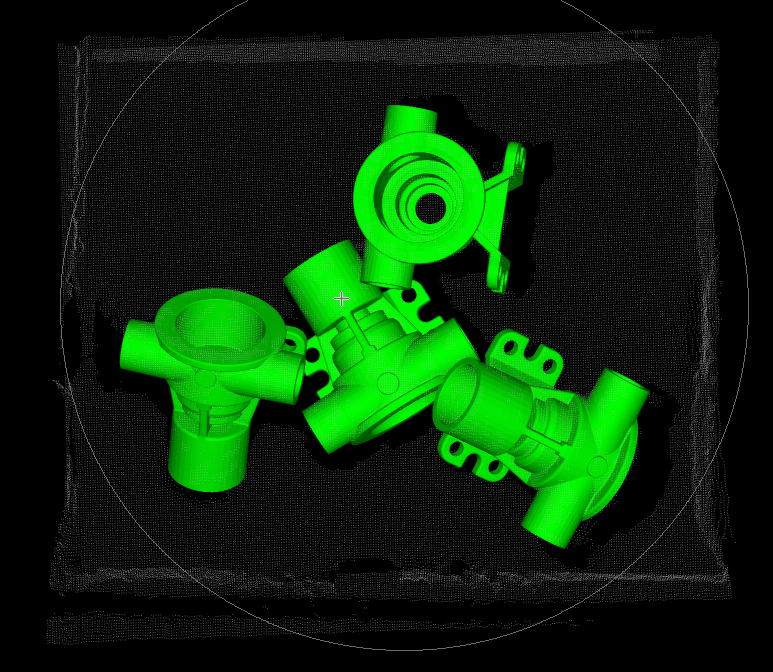
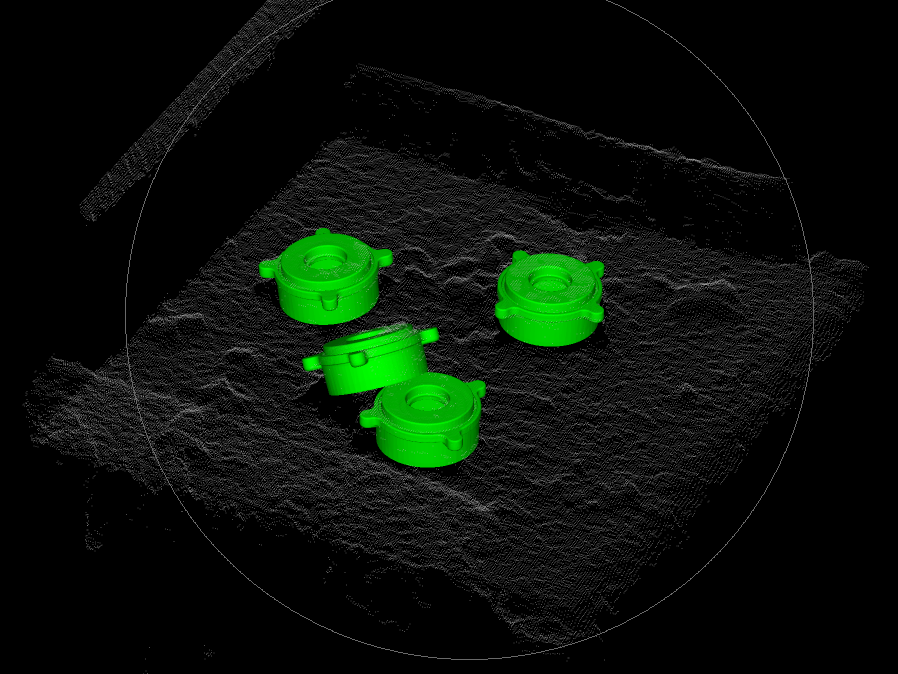
Esempio 3: Riconoscimento di più pezzi all'interno dell'area inquadrata
|
Immagine reale
|
Ricostruzione oggetti
|

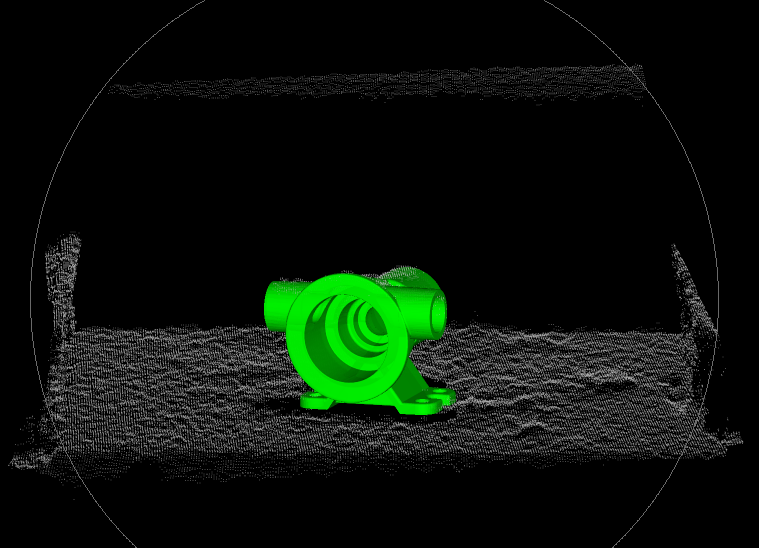
Grazie a questo metodo si eliminano i problemi della luce ambientale e dello sporco su nastro.
Esempio 4: Identificazione pezzi su nastro sporco
 |
 |
 |
 |
